东南大学仪器科学与工程学院院长宋爱国教授:“具有力觉临场感的空间遥操作机器人技术”
东南大学仪器科学与工程学院院长宋爱国教授:“具有力觉临场感的空间遥操作机器人技术”
2016年12月3日至4日,由西北工业大学学科建设办公室、机电学院主办,空天微纳系统教育部重点实验室、陕西省微/纳米系统重点实验室承办,空气动力学国家重点实验室、无人机特种技术国防科技重点实验室、国家金属腐蚀控制工程技术研究中心协办的“航空航天与微纳系统技术交叉学科论坛”在我校友谊校区成功举行。会议中,东南大学仪器科学与工程学院院长宋爱国教授作了“具有力觉临场感的空间遥操作机器人技术”的主题报告。

宋爱国教授
以下为宋爱国教授报告详情:
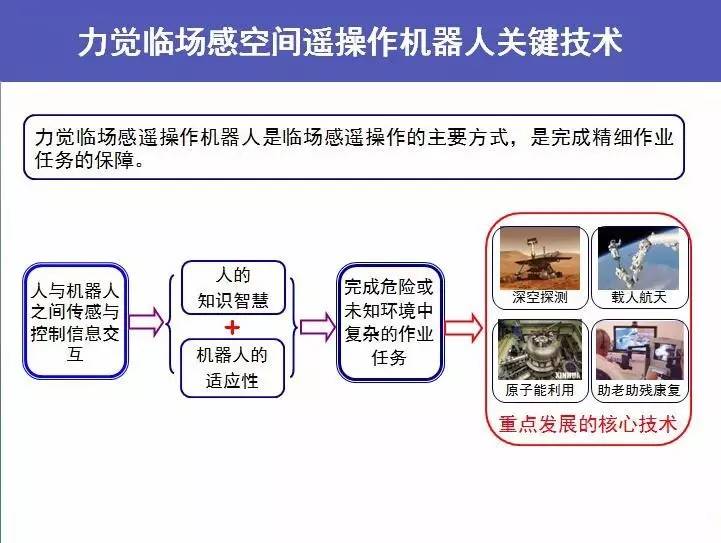
人机交互遥操作机器人是完成空间环境下作业的有力手段,而临场感遥操作是空间机器人的关键技术。临场感的概念是指将远地机器人和环境的相互作用信息(视觉的、力觉的、触觉的等)实时地反馈给本地操作者,生成关于远地环境映射的虚拟现实,使操作者产生身临其境的感受,从而有效地控制机器人完成复杂的作业任务。具有临场感的遥操作机器人的实现,将极大地改善机器人的作业能力,人们可以将自己的智慧同机器人的适应能力相结合而完成有害环境或远距离环境中的作业任务,如空间探索、海洋开发、远程医疗、远程实验等。
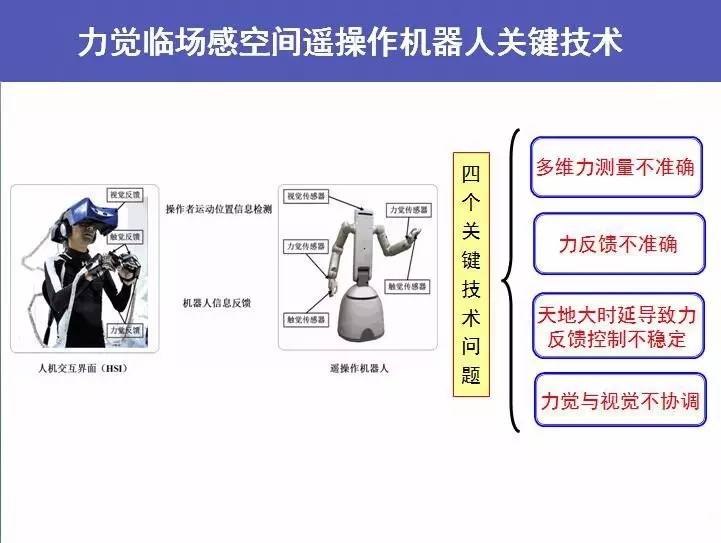
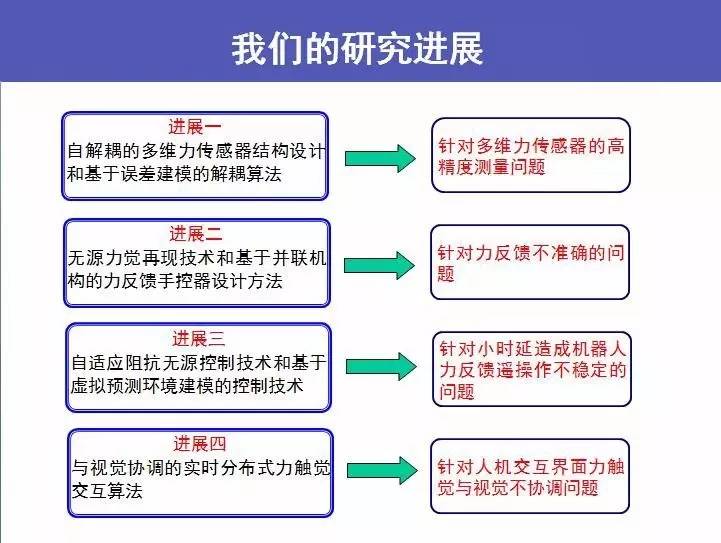
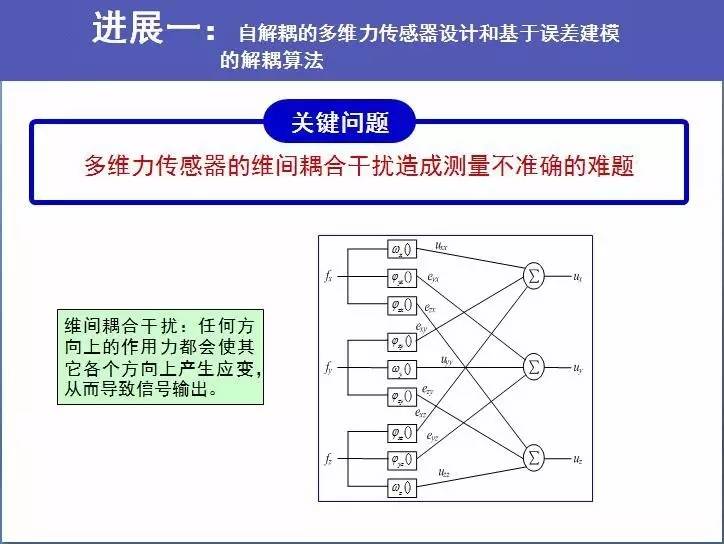
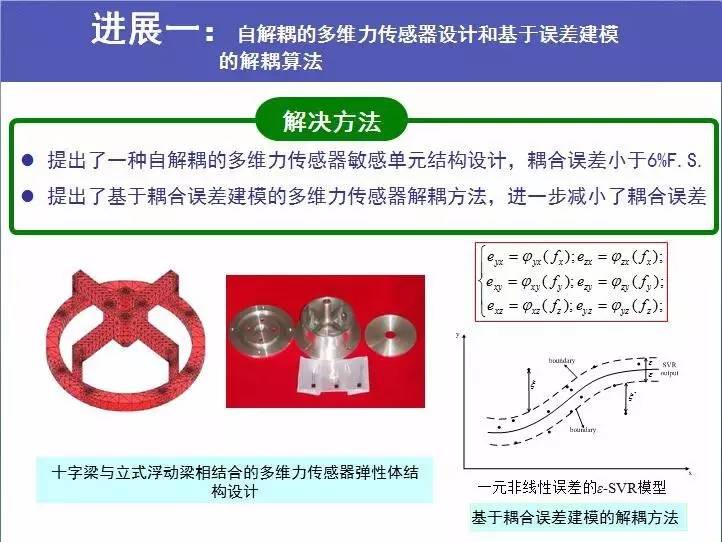
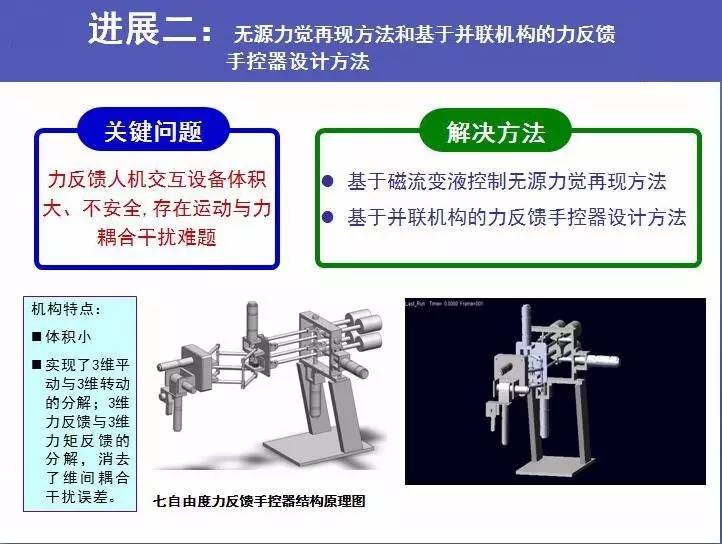
本报告针对具有力觉临场感的空间遥操作机器人的四大关键技术:力感知、力反馈、力控制、力觉与视觉的协调进行了介绍,然后报告了东南大学仪器科学与工程学院机器人传感与控制技术所在具有力觉临场感的空间遥操作机器人关键技术研究方面取得的进展和在载人航天与探月工程领域的应用情况。


想了解更多?
那就赶紧来关注我们
长按二维码 关注我们
微信ID:JXKXYJS
宋爱国
最新事件